AK (@_akhaliq)
2025-06-09 | ❤️ 137 | 🔁 23
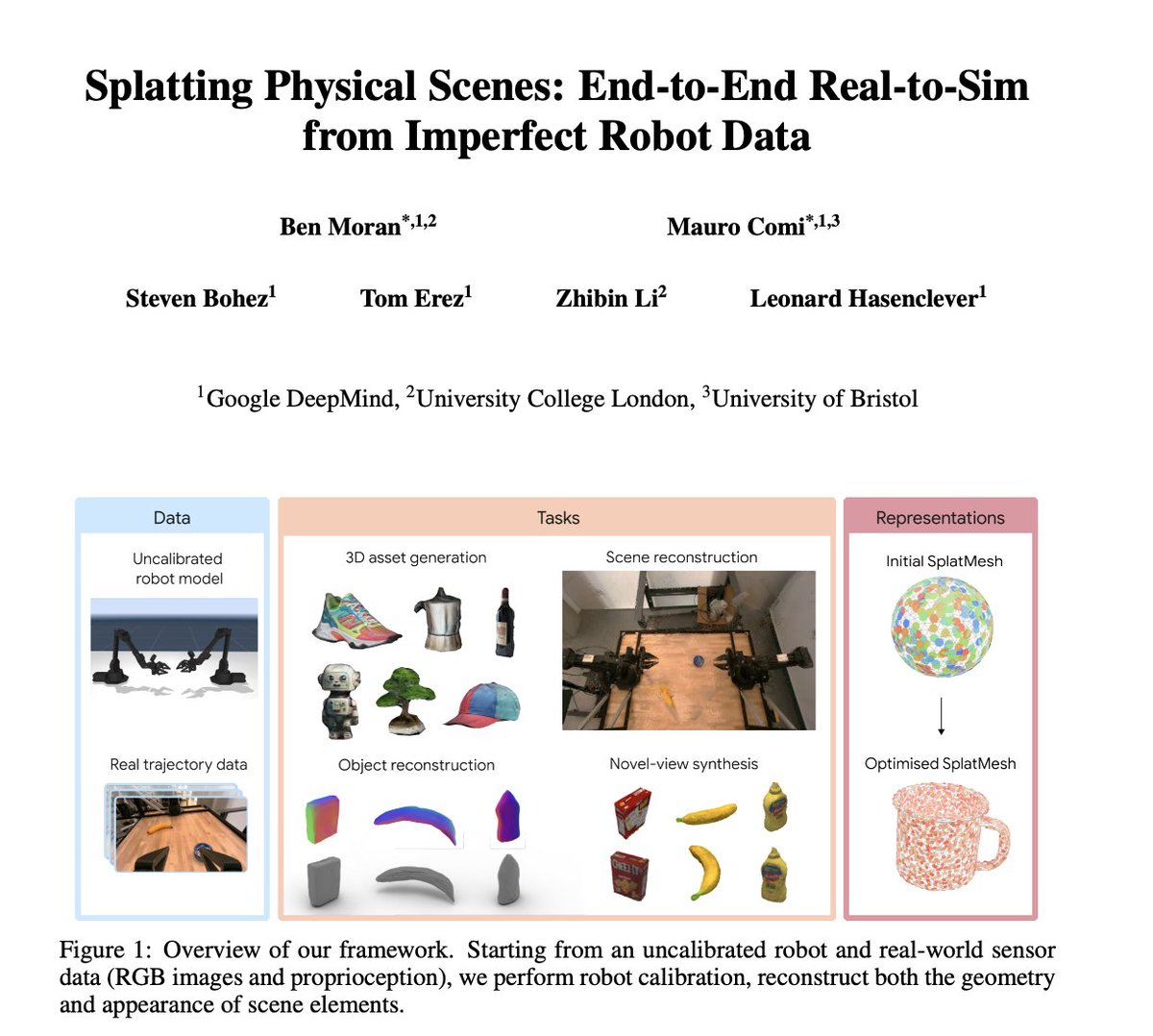
Splatting Physical Scenes
End-to-End Real-to-Sim from Imperfect Robot Data https://x.com/_akhaliq/status/1932123432583631324/photo/1
미디어
2025-06-09 | ❤️ 137 | 🔁 23
Splatting Physical Scenes
End-to-End Real-to-Sim from Imperfect Robot Data https://x.com/_akhaliq/status/1932123432583631324/photo/1