Chris Paxton (@chris_j_paxton)
2024-06-11 | ❤️ 146 | 🔁 23
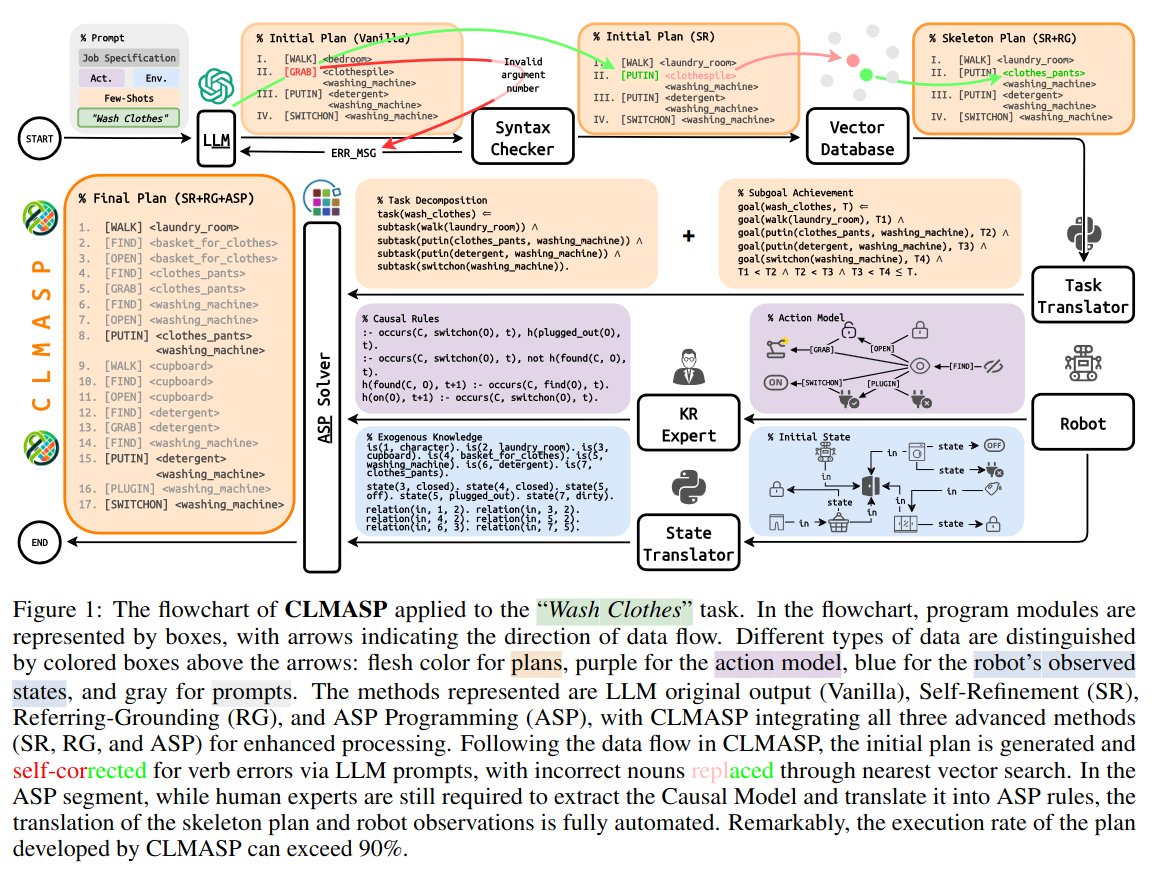
How do you make sure LLMs are actually able to generate usable task plans for robotic agents? There are so many different constraints that need to be obeyed; LLMs are great at capturing commonsense knowledge but not at making this actionable. Lin et al. suggest combining them with Answer Set Programming (paper)
미디어