MrNeRF (@janusch_patas)
2025-08-28 | ❤️ 60 | 🔁 7
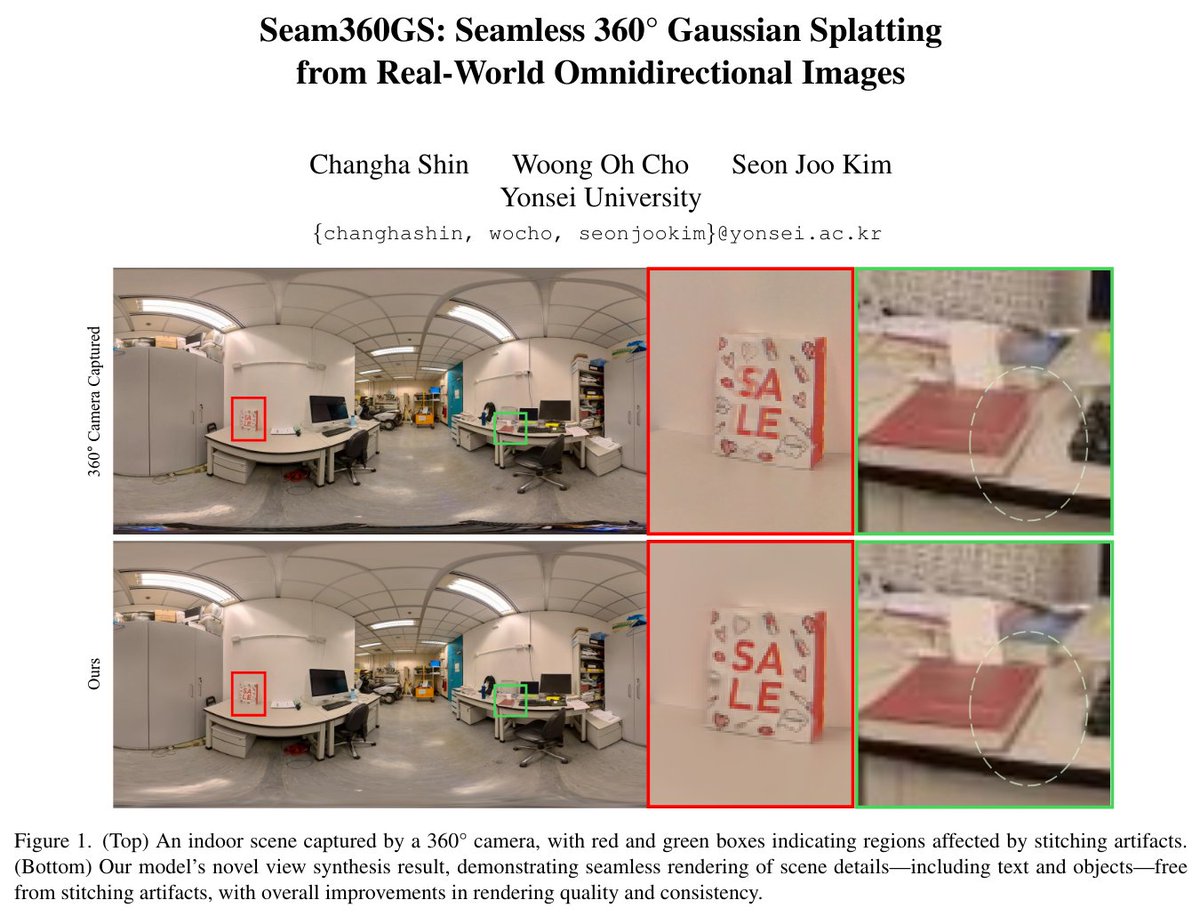
Seam360GS: Seamless 360° Gaussian Splatting from Real-World Omnidirectional Images
Contributions: • We propose a novel framework that integrates omnidirectional dual-fisheye distortion modeling with the 3D Gaussian splatting paradigm. Our algorithm optimizes the ideal 3D positions of Gaussian splats by jointly calibrating for both lens distortions and the inter-camera gap.
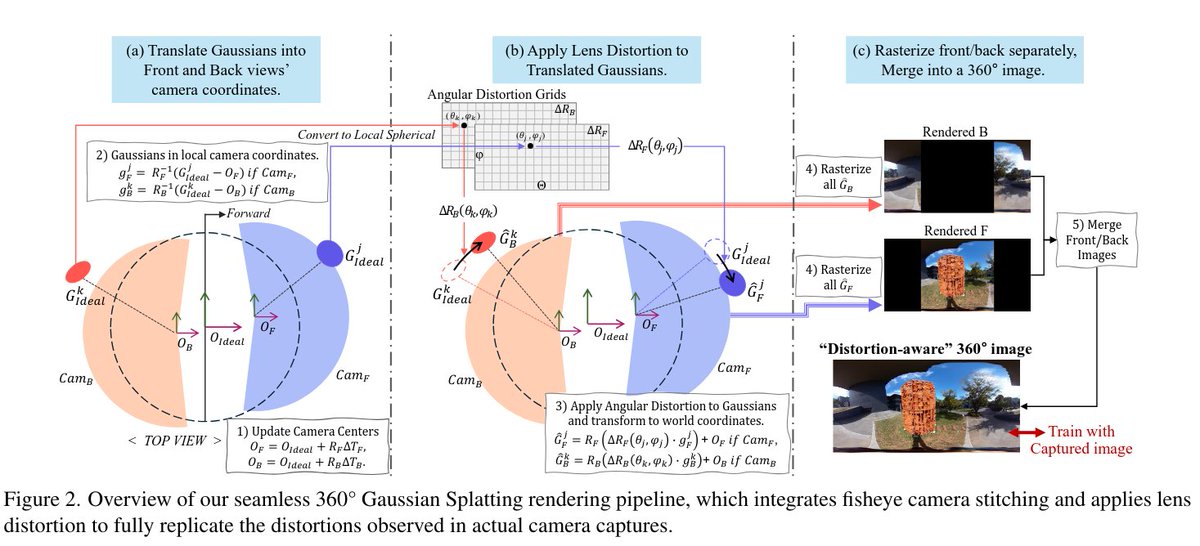
• Our approach enables seamless omnidirectional novel view synthesis without incurring additional computational overhead. During training, we generate realistic, imperfect 360° images that simulate dual fisheye artifacts and compare them to actual captures to learn robust calibration parameters. At inference, the calibration module is deactivated, ensuring that the system operates efficiently while still delivering flawlessly rendered 360° views.
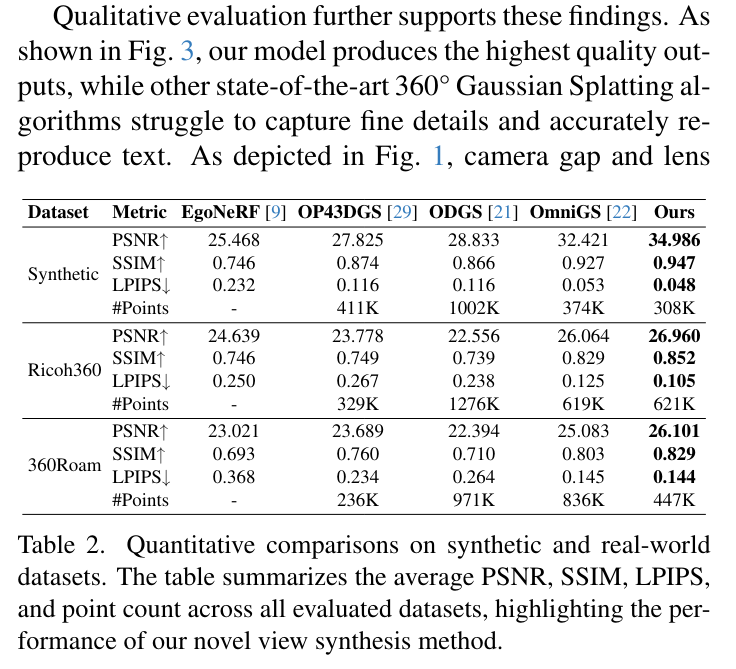
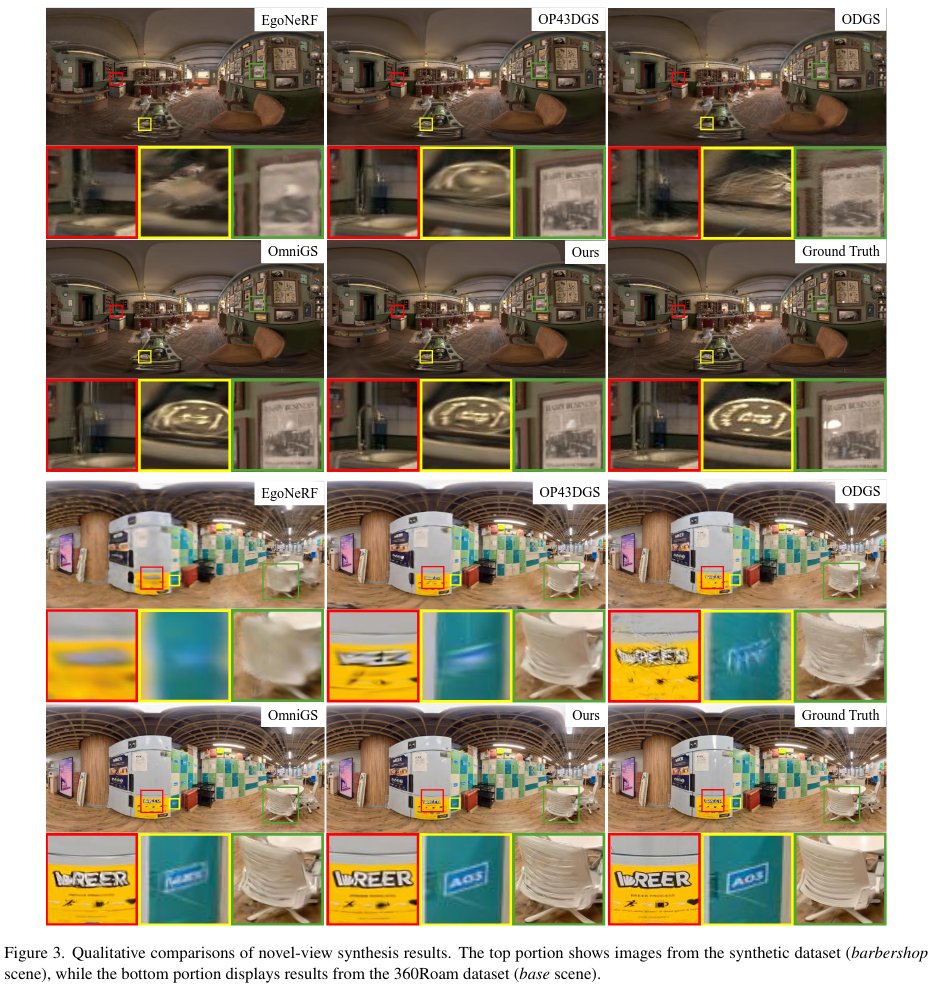
• Extensive experiments on real-world 360° benchmark datasets [9, 14] demonstrate that our method consistently outperforms existing state-of-the-art algorithms for omnidirectional novel view synthesis.
미디어